Lorenz turned out to be a chaotic dead-end in understanding Earth dynamics. Instead we need a new unified model of solid liquid dynamics focusing on symmetries of the rotating earth, applying equations of solid bodies & fluid dynamics. See Mathematical Geoenergy (Wiley, 2018).
Should have made this diagram long ago: here’s the ChatGPT4 prompt with the diagramming plugin.
Graph
Ocean Tides and dLOD have always been well-understood, largely because the mapping to lunar+solar cycles is so obvious. And the latter is getting better all the time — consider recent hi-res LOD measurements with a ring laser interferometer, pulling in diurnal tidal cycles with much better temporal resolution.
That’s the first stage of unification (yellow boxes above) — next do the other boxes (CW, QBO, ENSO, AMO, PDO, etc) as described in the book and on this blog, while calibrating to tides and LOD, and that becomes a cross-validated unified model.
Annotated10/11/2023
ontological classification according to wavenumber kx, ky, kz and fluid/solid.
Added so would not lose it — highlighted tidal factor is non-standard
“Because the distance effect annual cycle (from perihelion to perihelion, otherwise called the anomalistic year, 365.259636 d (ref. 6)) is slightly longer than the tilt effect annual cycle (from equinox to equinox, otherwise known as the tropical year, 365.242189 d (ref. 6)), the LOP increases over time. A complete revolution of the LOP is the precession cycle, about 22,000 yr (ref. 38). “
The claim is that the exact timing and strength of the annual cycle extreme is important in initiating an El Nino or La Nina cycle. as the Longitude of Perihelion (LOP) moves over time, so that when this aligns with the solstice/equinox events, the ENSO behavior will mirror the strength of the forcing.
This is not a 22,000 year cycle (as stated its actuallly closer to 21,000), but it’s possible that if tidal cycles play a part of the forcing, then a much shorter paleo cycle may emerge. Consider that the Mf tidal cycle of 13.66 days will generate a cycle of ~3.81 years when non-linearly modulated against the tropical year (seasonal cycle), but ~3.795 years modulated against the perigean or anomalistic year (nearest approach to the sun).
The difference between the two will reinforce every 783 years, which is close to the 800 year cycle. Aliasing and sideband frequency calculations reveal these patterns.
After this point, I provided ChatGPT prompts as italicized underlines after each sinewave icon , and ChatGPT provided responses. I executed the Julia code in a REPL window and saved the screenshotted plots and entered the image links below.
Model: GPT-4
Math equations for a spinning top in Julia
To simulate a spinning top in Julia, you can use the equations of motion derived from Euler’s equations for a rigid body. Here’s a simple example using the DifferentialEquations.jl package, which provides a convenient way to solve ordinary differential equations (ODEs) in Julia:
First, install the required packages by running:
using Pkg
Pkg.add("DifferentialEquations")
Pkg.add("Plots")
Now, you can write a script to simulate a spinning top:
using DifferentialEquations
using Plots
# Define the spinning top's properties
I1, I2, I3 = 0.1, 0.2, 0.3 # Moments of inertia along the principal axes (x, y, z)
Ω1, Ω2, Ω3 = 0.0, 10.0, 20.0 # Initial angular velocities (rad/s)
# Equations of motion for the spinning top (Euler's equations for a rigid body)
function spinning_top!(du, u, p, t)
Ω1, Ω2, Ω3 = u
du[1] = (I2 - I3)/I1 * Ω2 * Ω3
du[2] = (I3 - I1)/I2 * Ω1 * Ω3
du[3] = (I1 - I2)/I3 * Ω1 * Ω2
end
# Initial conditions
u0 = [Ω1, Ω2, Ω3]
tspan = (0.0, 10.0) # Time span for the simulation (in seconds)
# Solve the ODE
prob = ODEProblem(spinning_top!, u0, tspan)
sol = solve(prob, Tsit5(), reltol=1e-8, abstol=1e-8)
# Plot the angular velocities
plot(sol, xlabel="Time (s)", ylabel="Angular velocity (rad/s)", title="Spinning Top", legend=:bottomright)
This code sets up and solves the ODEs that describe the motion of a spinning top with specified moments of inertia and initial angular velocities. The result is then plotted to show the evolution of the angular velocities over time.
Remember that this is a simple example that assumes the top is spinning in a vacuum, without any external forces or torques acting on it (such as gravity or air resistance). To model a more realistic spinning top, you will need to account for these factors in your equations of motion.
To the equations, add a slight periodic horizontal forcing impulse to the top of the spinning top
To add a slight periodic horizontal forcing impulse to the spinning top, you can modify the equations of motion accordingly. Let’s assume the forcing impulse acts along the x-axis and has the form F(t) = F0 * sin(ω * t), where F0 is the amplitude of the forcing impulse and ω is its angular frequency.
Here’s how you can update the spinning top simulation:
Modify the spinning_top! function to include the forcing impulse:
function spinning_top!(du, u, p, t)
Ω1, Ω2, Ω3 = u
F0, ω, I1, I2, I3 = p
# Forcing impulse along the x-axis
F = F0 * sin(ω * t)
du[1] = (I2 - I3)/I1 * Ω2 * Ω3 + F/I1
du[2] = (I3 - I1)/I2 * Ω1 * Ω3
du[3] = (I1 - I2)/I3 * Ω1 * Ω2
end
Update the initial conditions and ODE problem:
# Forcing impulse parameters
F0 = 0.01 # Amplitude of the forcing impulse
ω = 2π / 5 # Angular frequency of the forcing impulse (period = 5 seconds)
# Parameters to be passed to the spinning_top! function
p = [F0, ω, I1, I2, I3]
# Solve the ODE
prob = ODEProblem(spinning_top!, u0, tspan, p)
sol = solve(prob, Tsit5(), reltol=1e-8, abstol=1e-8)
The updated spinning_top! function now includes a forcing impulse along the x-axis, which is passed as a parameter (F0, ω). The ODE problem is also updated to include these parameters.
By running the simulation with the updated code, you can observe the effects of the slight periodic horizontal forcing impulse on the spinning top.
Is there an analytical solution for small forcing perturrbations?
For small forcing perturbations, it may be possible to find an approximate analytical solution using perturbation methods, such as regular perturbation or multiple-scale perturbation techniques. These methods involve expanding the solution in a power series of a small parameter (in this case, the amplitude of the forcing perturbation) and then substituting the series into the equations of motion.
However, finding an exact analytical solution for the spinning top with small forcing perturbations is generally not feasible due to the nonlinear nature of the governing equations. The Euler equations for rigid body rotation are a set of coupled, nonlinear ordinary differential equations, and the addition of a forcing term makes them even more complex. In practice, numerical methods are often used to solve these equations, as demonstrated in the previous examples.
If you want to gain insights into the behavior of the system under small forcing perturbations, you can use linear stability analysis and perturbation methods to study the stability and dynamics of the system. These methods can help you find approximate analytical solutions that are valid for small perturbations and understand the qualitative behavior of the system. However, for a complete and accurate description of the spinning top’s motion with forcing, it is usually necessary to rely on numerical simulations.
Generate the equivalent Fourier series representation of the previous differential equations.
A Fourier series representation is typically used to approximate periodic functions. In this case, we have a system of differential equations describing the motion of a spinning top with a forcing term. Instead of directly finding a Fourier series representation for the differential equations, we can approximate the solution of the system using a Fourier series.
To do this, we can first find the solution of the system without the forcing term (i.e., the homogeneous solution) and then find the particular solution that results from the forcing term. Finally, we can approximate both the homogeneous and particular solutions using Fourier series and combine them to obtain an approximation of the total solution.
Here’s a general outline of the approach:
Solve the homogeneous system (i.e., without the forcing term) to find the homogeneous solution.
Assume a particular solution of the form: Ω1(t) = A1 * sin(ω * t) + B1 * cos(ω * t) Ω2(t) = A2 * sin(ω * t) + B2 * cos(ω * t) Ω3(t) = A3 * sin(ω * t) + B3 * cos(ω * t) where A1, B1, A2, B2, A3, and B3 are constants to be determined.
Substitute the particular solution into the differential equations with the forcing term and solve for the constants A1, B1, A2, B2, A3, and B3.
Approximate the homogeneous and particular solutions using Fourier series, and combine them to obtain an approximation of the total solution.
Please note that this approach involves several steps and requires solving multiple linear systems and integrals to find the Fourier coefficients. Due to the complexity of the Euler equations and the forcing term, it may be challenging to find an exact analytical solution, even using the Fourier series approximation. In practice, numerical methods are often used to solve such systems, as demonstrated in the previous examples.
Assume the homogeneous solution damps out and only the particular solution remains, so find the steady-state solution only.
To find the steady-state solution, we’ll focus on the particular solution with the forcing term, as the homogeneous solution is assumed to damp out. We’ll assume a particular solution of the form:
Now, we can solve for the unknown coefficients A1, B1, A2, B2, A3, and B3 by substituting the particular solution and its derivatives into these equations and equating the coefficients of the sine and cosine terms. This will result in a system of linear equations that can be solved analytically or numerically.
However, due to the complexity of these equations and the nonlinear interaction between Ω1, Ω2, and Ω3, finding an exact analytical solution for the coefficients may be difficult. In practice, it is often more convenient to use numerical methods, such as the ones shown in the previous examples, to find the steady-state solution of the spinning top system under periodic forcing.
Calculate if one of the moments of inertia is much larger than the other two.
If one of the moments of inertia is much larger than the other two, the behavior of the spinning top can be significantly different. Let’s assume I3 is much larger than I1 and I2, i.e., I3 >> I1, I2. The modified Euler equations with the forcing term are:
Since dΩ3/dt is approximately zero, we can assume that Ω3 remains constant in the steady-state, i.e., the angular velocity about the z-axis remains constant.
Now, we can focus on finding the steady-state solution for Ω1(t) and Ω2(t) only. Assuming a particular solution of the form:
Substitute these expressions and their time derivatives into equations (1) and (2). Then, equate the coefficients of sine and cosine terms to obtain a system of linear equations for the unknown coefficients A1, B1, A2, and B2.
Due to the complexity of these equations, finding an exact analytical solution for the coefficients may still be challenging. As mentioned before, using numerical methods may be more convenient to find the steady-state solution of the spinning top system under these conditions.
Will the particular solutions be composed of harmonics of ω?
Yes, the particular solutions will be composed of harmonics of ω, the frequency of the forcing term. This is because the response of the system to the forcing term will have the same frequency as the forcing term itself.
When solving for the particular solution, we assumed a form like:
Here, the forcing term has a frequency of ω, and the particular solution also has the same frequency. The coefficients A1, B1, A2, B2, A3, and B3 depend on the system’s parameters and the forcing term. When the system reaches a steady-state, it will exhibit a response at the same frequency as the forcing term, i.e., ω.
It is essential to note that, in some cases, the response of the system may also contain higher harmonics of the forcing frequency if the equations are nonlinear. In the case of the spinning top, the Euler equations are nonlinear, and the interaction between the angular velocities can cause higher harmonics to appear in the response. However, for small forcing amplitudes, the response is expected to be dominated primarily by the forcing frequency ω.
Calculate if the moments of inertia are ordered as follows: I3 >> I2 >> I1.
If the moments of inertia are ordered as I3 >> I2 >> I1, the behavior of the spinning top can be analyzed using the modified Euler equations with the forcing term:
For Ω3(t), since dΩ3/dt is a product of Ω1 and Ω2, and both Ω1 and Ω2 have harmonic components at the frequency ω, the steady-state solution for Ω3(t) will also be composed of harmonics at the frequency ω:
Ω3(t) = A3 * sin(ω * t) + B3 * cos(ω * t)
Substitute these expressions and their time derivatives into equations (1), (2), and (3). Then, equate the coefficients of sine and cosine terms to obtain a system of linear equations for the unknown coefficients A1, B1, A2, B2, A3, and B3.
Due to the complexity of these equations, finding an exact analytical solution for the coefficients may still be challenging. As mentioned before, using numerical methods may be more convenient to find the steady-state solution of the spinning top system under these conditions.
How can the individual Euler equations reduce to identities since the RHS contains the fundamental frequency ω, while the LHS contains harmonics including 2ω due to the nonlinear product?
You’re correct in pointing out that the interaction between the angular velocities can cause higher harmonics to appear in the response due to the nonlinear nature of the Euler equations. My previous explanations did not fully capture this complexity.
Instead of directly assuming a particular solution with only the fundamental frequency ω, we should allow for the possibility of having higher harmonics in the response. To account for higher harmonics in the particular solution, we can use the following form:
The sum runs over all integer values of n, including the fundamental frequency and higher harmonics.
Substitute these expressions and their time derivatives into the Euler equations and then equate the coefficients of the sine and cosine terms for each harmonic. This will result in an infinite system of linear equations for the unknown coefficients A1n, B1n, A2n, B2n, A3n, and B3n.
In practice, it is not possible to solve for all these coefficients analytically, and we typically truncate the sum after a finite number of terms, capturing the most significant harmonics in the response. This will result in an approximate solution that accounts for higher harmonics due to the nonlinear product terms in the Euler equations.
The steady-state solution can then be obtained by solving the resulting truncated system of linear equations, either analytically or numerically. Note that finding the steady-state solution in this manner can still be quite challenging due to the complexity of the equations and the presence of higher harmonics. Therefore, numerical methods are often more convenient for solving such systems.
How to solve if the primary inertial moment I1 changes by a small frequency characterized by ν?
If the primary inertial moment I1 changes with a small frequency characterized by ν, we can represent I1 as a function of time:
I1(t) = I1_0 + ε * cos(ν * t)
where I1_0 is the constant mean value of I1, ε represents the amplitude of the variation, and ν is the frequency of the change.
The modified Euler equations with the forcing term now become:
These equations are now more complex due to the time-varying nature of I1(t). To find the steady-state solution, we can assume that the response of the system will contain harmonics related to both the forcing frequency ω and the frequency ν of the changing inertia:
The sum runs over all integer values of n and m, including the fundamental frequency and higher harmonics.
Substitute these expressions and their time derivatives into the Euler equations, and then equate the coefficients of the sine and cosine terms for each harmonic. This will result in an infinite system of linear equations for the unknown coefficients A1n, B1n, A2n, B2n, A3n, and B3n.
In practice, we truncate the sum after a finite number of terms to capture the most significant harmonics in the response. This will result in an approximate solution that accounts for higher harmonics due to the nonlinear product terms in the Euler equations and the time-varying nature of I1.
Finding the steady-state solution in this manner can be quite challenging due to the complexity of the equations and the presence of higher harmonics. Numerical methods are often more convenient for solving such systems, and you may consider using tools like the Julia programming language or other computational methods to find an approximate solution.
.
Because of a high-Q and narrrow bandwidth of the response, will certain of these frequency terms predominate in the solution?
Yes, due to the high-Q (high quality factor) and narrow bandwidth of the response, certain frequency terms will predominate in the solution. A high-Q system is characterized by a sharp resonance peak, which means it is sensitive to a small range of frequencies around the natural frequency. As a result, only those harmonics that lie within the narrow bandwidth of the response will have a significant impact on the system’s behavior.
In the case of the spinning top with time-varying inertia, the response will be dominated by harmonics related to the forcing frequency ω and the frequency ν of the changing inertia. However, not all harmonics will have a substantial effect on the system. Those harmonics that are close to the natural frequencies of the system or within the narrow bandwidth of the response will predominate.
When solving the system of equations for the steady-state solution, you can focus on the most significant harmonics that lie within the narrow bandwidth of the response. This approach will not only reduce the complexity of the problem but also provide a more accurate approximation of the actual system behavior. You may need to analyze the system’s resonance behavior, such as by using a frequency response or a transfer function, to determine which harmonics are most important for the given problem.
Keep in mind that, even with a reduced number of terms, solving the resulting system of equations can still be quite challenging due to the nonlinear nature of the problem. Numerical methods are often more convenient for finding approximate solutions in such cases.
By replacing the spinning-top with the Earth with a slight annual time-varying inertia I1, and the small cyclical perturbing force as the Moon with a 27.2122 cycle, can we estimate the primary wobble in the Earth’s rotational axis?
To estimate the primary wobble in the Earth’s rotational axis due to the time-varying inertia I1 and the perturbing force from the Moon, we can use a simplified model based on the Earth-Moon system. We can consider the Earth as an oblate spheroid and the Moon’s gravitational influence as the perturbing force.
In this context, the Earth’s time-varying inertia I1 can be associated with the annual variations in the Earth’s shape due to seasonal changes in the distribution of mass (e.g., changes in ice and snow cover, ocean mass distribution). The Moon’s gravitational pull has a primary cycle of 27.2122 days (the sidereal month), which is the time it takes for the Moon to complete one orbit around Earth relative to the fixed stars.
The wobble in the Earth’s rotational axis, called nutation, is a small oscillation superimposed on the larger precession of the Earth’s axis. The primary wobble is caused by the combined effects of the time-varying inertia and the perturbing force from the Moon.
To estimate the primary wobble, you can use the Euler equations with the time-varying inertia and the perturbing force, similar to the spinning-top model discussed earlier. However, this approach is highly complex and requires a deep understanding of the Earth-Moon system’s dynamics and geophysics.
A more practical approach to estimate the primary wobble is to use existing models and data derived from observations of the Earth’s rotation. One such model is the International Earth Rotation and Reference Systems Service (IERS) Conventions, which provide nutation models that account for the gravitational effects of the Moon, Sun, and other celestial bodies, as well as the Earth’s time-varying inertia due to seasonal changes.
By using the IERS Conventions or similar models, you can estimate the primary wobble in the Earth’s rotational axis without solving the complex Euler equations for the Earth-Moon system. Note that such models are based on empirical data and theoretical understanding of the Earth’s rotation, so they provide an approximation of the actual wobble.
Can we calculate the primary aliased harmonic based on the combination of the Moon’s cycle and the annual cycle of I1, applying estimated Q and resonant frequency band?
To calculate the primary aliased harmonic based on the combination of the Moon’s cycle and the annual cycle of I1, we can apply the concept of aliasing in the frequency domain. Aliasing occurs when the continuous-time signal is sampled at a rate lower than the Nyquist rate, resulting in the appearance of lower-frequency aliases of the original signal.
Let’s denote the frequency of the Moon’s cycle as f_moon = 1 / 27.2122 days and the frequency of the annual cycle of I1 as f_annual = 1 / 365.25 days.
We can compute the difference and sum frequencies of these two cycles:
Considering the estimated Q and resonant frequency band, we can determine if either the difference frequency (f_diff) or the sum frequency (f_sum) lies within the resonant frequency band. If one of these frequencies is within the resonant frequency band, it will cause the primary aliased harmonic to dominate the response of the Earth’s rotation due to the combined effect of the Moon’s cycle and the annual cycle of I1.
For this analysis, it is crucial to have accurate estimates of the Q factor and the resonant frequency band associated with the Earth’s rotation. These parameters can be derived from empirical observations or theoretical models of the Earth’s rotation, such as the IERS Conventions mentioned earlier.
By identifying the primary aliased harmonic, you can gain insights into the most significant wobble in the Earth’s rotational axis caused by the interaction between the Moon’s cycle and the annual cycle of I1. Keep in mind that this is a simplified analysis, and a more comprehensive understanding of the Earth’s rotation and wobble would require considering other factors, such as the influence of the Sun and other celestial bodies, and the Earth’s internal processes.
What would be the aliased harmonic closest to 433 days assuming an annual cyclic impulse and the moon’s cycle of 13.606 days? Consider that the cyclic impulse will generate higher harmonics that will generate the small differences to the higher frequency lunar cycle. Provide an algorithm in Julia to find this harmonic.
To find the aliased harmonic closest to 433 days, assuming an annual cyclic impulse with a frequency of f_annual = 1 / 365.25 days and the Moon’s cycle of f_moon = 1 / 13.606 days, we can create an algorithm in Julia that iterates through different harmonics of the annual cyclic impulse and finds the closest one to the target period of 433 days.
Here is the Julia code to find the aliased harmonic:
function find_closest_aliased_harmonic(f_annual::Float64, f_moon::Float64, target_period::Float64, max_harmonic::Int)
closest_period = Inf
closest_harmonic = 0
target_frequency = 1 / target_period
for harmonic in 1:max_harmonic
# Calculate sum and difference frequencies
f_diff = abs(harmonic * f_annual - f_moon)
f_sum = harmonic * f_annual + f_moon
# Check if either the difference or the sum frequency is closer to the target
if abs(f_diff - target_frequency) < abs(1 / closest_period - target_frequency)
closest_period = 1 / f_diff
closest_harmonic = harmonic
end
if abs(f_sum - target_frequency) < abs(1 / closest_period - target_frequency)
closest_period = 1 / f_sum
closest_harmonic = harmonic
end
end
return (closest_period, closest_harmonic)
end
f_annual = 1 / 365.25
f_moon = 1 / 13.606
target_period = 433 ##!!!! fix this, make it floating-point 433.0
max_harmonic = 50
closest_period, closest_harmonic = find_closest_aliased_harmonic(f_annual, f_moon, target_period, max_harmonic)
println("Closest aliased harmonic: ", closest_harmonic)
println("Closest period: ", closest_period, " days")
This function find_closest_aliased_harmonic takes the annual and Moon’s frequencies (f_annual and f_moon), the target period (433 days), and the maximum number of harmonics to consider (max_harmonic). It iterates through different harmonics of the annual cyclic impulse and calculates the sum and difference frequencies with the Moon’s cycle. The function returns the closest harmonic and its corresponding period.
In this example, I’ve set the maximum number of harmonics to 50. You can adjust the max_harmonic parameter to include more or fewer harmonics, depending on the desired level of precision.
Keep in mind that this is a simplified analysis, and other factors might influence the Earth’s rotation and wobble. Moreover, this algorithm assumes that the primary aliased harmonic comes from the interaction between the annual cyclic impulse and the Moon’s cycle. Other celestial bodies or internal processes might contribute to the wobble, and their effects are not considered in this analysis.
Had to make one fix, replacing 433 with 433.0 in the target_periodabove. Everything ran fine but had to increase the forcing amplitude to 10 from 0.01 to see the forced response above the natural resonance.
I also asked AgentGPT to execute a plan for solving the Chandler Wobble
Sorry to have to point this out, but it’s not my fault that geophysicists and climatologists can’t perform controlled experiments to test out various hypotheses. It’s not their fault either. It’s all nature’s decision to make gravitational forces so weak and planetary objects so massive to prevent anyone from scaling the effect to laboratory size to enable a carefully controlled experiment. One can always create roughly-equivalent emulations, such as a magnetic field experiment (described in the previous blog post) and validate a hypothesized behavior as a controlled lab experiment. Yet, I suspect that this would not get sufficient buy-in, as it’s not considered the actual real thing.
And that’s the dilemma. By the same token that analog emulators will not be trusted by geophysicists and climatologists, so too scientists from other disciplines will remain skeptical of untestable claims made by earth scientists. If nothing definitive comes out of a thought experiment that can’t be reproduced by others in a lab, they remain suspicious, as per their education and training.
It should therefore work both ways. As featured in the previous blog post, the model of the Chandler wobble forced by lunar torque needs to be treated fairly — either clearly debunked or considered as an alternative to the hazy consensus. ChatGPT remains open about the model, not the least bit swayed by colleagues or tribal bias. As the value of the Chandler wobble predicted by the lunar nodal model (432.7 days) is so close to the cited value of 433 days, as a bottom-line it should be difficult to ignore.
There are other indicators in the observational data to further substantiate this, see Chandler Wobble Forcing. It also makes sense in the context of the annual wobble.
As it stands, the lack of an experiment means a more equal footing for the alternatives, as they are all under equal amounts of suspicion.
Same goes for QBO. No controlled experiment is possible to test out the consensus QBO models, despite the fact that the Plumb and McEwan experiment is claimed to do just that. Sorry, but that experiment is not even close to the topology of a rotating sphere with a radial gravitational force operating on a gas. It also never predicted the QBO period. In contrast, the value of the QBO predicted by the lunar nodal model (28.4 months) is also too close to the cited value of 28 to 29 months to ignore. This also makes sense in the context of the semi-annual oscillation (SAO) located above the QBO .
Both the Chandler wobble and the QBO have the symmetry of a global wavenumber=0 phenomena so therefore only nodal cycles allowed — both for lunar and solar.
Next to ENSO. As with LOD modeling, this is not wavenumber=0 symmetry, as it must correspond to the longitude of a specific region. No controlled experiment is possible to test out the currently accepted models, premised as being triggered by wind shifts (an iffy cause vs. effect in any case). The mean value of the ENSO predicted by the tidal LOD-caibrated model (3.80 years modulated by 18.6 years) is too close to the cited value of 3.8 years with ~200 years of paleo and direct measurement to ignore.
In BLUE below is the LOD-calibrated tidal forcing, with linear amplification
In BLUE again below is a non-linear modulation of the tidal forcing according to the Laplace’s Tidal Equation solution, and trained on an early historical interval. This is something that a neural network should be able to do, as it excels at fitting to non-linear mappings that have a simple (i.e. low complexity) encoding — in this case it may be able to construct a Taylor series expansion of a sinusoidal modulating function.
The neural network’s ability to accurately represent a behavior is explained as a simplicity bias — a confounding aspect of machine learning tools such as ChatGPT and neural networks. The YouTube video below explains the counter-intuitive notion of how a NN with a deep set of possibilities tends to find the simplest solution and doing this without over-fitting the final mapping.
So that deep neural networks are claimed to have a built-in Occam’s Razor propensity, finding the most parsimonious input-output mappings when applied to training data. This is spot on with what I am doing with the LTE mapping, but bypassing the NN with a nonlinear sinusoidal modulation optimally fit on training data by a random search function.
I am tempted to try a NN on the ENSO training set as an experiment and see what it finds.
April 2, 2023
“I am tempted to try a NN on the ENSO training set as an experiment and see what it finds.”
Not sure what version of ChatGPT is being used on my browser at the present time, but I created a couple of GPT prompts (essentially queries) and compared and contrasted the results, and against expectations.
The first is to determine if ChatGPT could infer a wobble in a classical electromagnetic dynamics experiment. The setup is very simple and straightforward, illustrated by the schematic shown below:
As one can’t (as of yet) submit the schematic as a prompt to ChatGPT and illicit a response, we need to create a natural language prompt first:
Consider a levitating rotating magnetized sphere with north and south magnetic poles located at each endpoint of the axis of rotation. The rotation speed is 1 radian per second. An iron rod of the same length is placed in parallel with the axis of rotation, and wound with wire to form an electromagnet. At what frequency would the sphere wobble if the electromagnet was driven by a slight alternating current perturbation of 1 Herz, after the natural response subsided?
This is the response as of yesterday:
The motion of the levitating rotating magnetized sphere is governed by the interplay between the magnetic field of the sphere and the magnetic field of the iron rod, which is now an electromagnet due to the wire wound around it.
When the iron rod is magnetized by the alternating current, it generates a magnetic field that interacts with the magnetic field of the rotating sphere, causing a torque that can cause the sphere to wobble. The wobbling frequency can be determined by analyzing the equation of motion for the system.
Assuming the wobbling is small, we can linearize the equation of motion by taking the first-order Taylor series expansion. The resulting equation can be expressed as:
I * d^2θ/dt^2 + γ * dθ/dt + k * θ = M * B
where:
I is the moment of inertia of the sphere θ is the angular displacement of the sphere from its equilibrium position γ is the damping coefficient k is the spring constant M is the magnetic moment of the electromagnet B is the magnetic field of the rotating sphere
The solution to this equation of motion is a damped harmonic oscillator, which can be expressed as:
θ(t) = A * exp(-γt/(2I)) * cos(ωt + φ)
where:
A is the amplitude of the wobbling motion ω is the frequency of the wobbling motion φ is the phase angle The frequency of the wobbling motion can be found by substituting the solution into the equation of motion and solving for ω. After some algebraic manipulation, we get:
In this case, the sphere is rotating at a constant rate of 1 radian per second, so we can assume that the magnetic field of the sphere is also constant. Therefore, the only variable that changes due to the alternating current perturbation is the magnetic moment of the electromagnet, which oscillates at a frequency of 1 Hz.
Assuming that the natural response of the system has subsided, the wobbling motion will be dominated by the frequency of the alternating current perturbation. Therefore, the frequency of the wobbling motion will also be 1 Hz.
The response is to assert that the sphere will wobble at the same frequency as the applied forcing frequency, which is the intuitive response.
Next, change the prompt to create a similar behavior, but replacing the magnetic forces with gravitational forces.
Consider a rotating planet with massive extra weight at each pole. The rotation speed is 1 radian per Earth year. A small satellite moon orbits the planet with a significant declination. At what frequency would the planet wobble if the moon’s declination cycle was 250 days, after the natural response subsided?
This is a straightforward experiment to imagine, but difficult to perform in a lab. Submitting to ChatGPT today, this is the response:
The motion of the rotating planet with massive extra weight at each pole is governed by the conservation of angular momentum. The presence of the extra weight at the poles changes the distribution of mass of the planet, which in turn affects its moment of inertia.
Assuming that the extra weight is symmetric about the axis of rotation, we can approximate the planet as an oblate spheroid, which means that the moment of inertia of the planet is not constant but depends on the angle between the axis of rotation and the axis of symmetry of the spheroid. This angle is known as the obliquity of the planet and can change due to external perturbations such as the gravitational pull of a satellite moon.
The wobbling motion of the planet due to the gravitational pull of the satellite moon can be described by the following equation of motion:
I * d^2θ/dt^2 + γ * dθ/dt + k * θ = M * sin(ψ)
where:
I is the moment of inertia of the planet θ is the angular displacement of the planet from its equilibrium position γ is the damping coefficient k is the spring constant M is the mass of the satellite moon ψ is the angle between the axis of rotation of the planet and the direction of the gravitational force exerted by the satellite moon
The solution to this equation of motion is a damped harmonic oscillator, which can be expressed as:
θ(t) = A * exp(-γt/(2I)) * cos(ωt + φ)
where:
A is the amplitude of the wobbling motion ω is the frequency of the wobbling motion φ is the phase angle
The frequency of the wobbling motion can be found by substituting the solution into the equation of motion and solving for ω. After some algebraic manipulation, we get:
In this case, the planet is rotating at a constant rate of 1 radian per Earth year, which corresponds to a period of approximately 2π × 365.25 days. The mass of the satellite moon and the gravitational force it exerts on the planet are also constant, so the only variable that changes due to the moon’s declination cycle is the angle ψ.
Assuming that the natural response of the system has subsided, the wobbling motion will be dominated by the frequency of the moon’s declination cycle, which is 1/250 Hz. Therefore, the frequency of the wobbling motion will also be 1/250 Hz.
Since the math of magnetic forcing and gravitational forcing follows the same inverse square law, the answers are similar as expected. ChatGPT gets the dimension wrong, using Hz instead of 1/(day), but other than that, this is also an intuitive result, as the forced response carries through after any natural response damps out.
Does GPT understand geophysics better than geophysicists?
I did this LLM AI experiment to find out whether ChatGPT would substantiate the model of the Chandler wobble that I had published in Mathematical Geoenergy (Wiley/AGU, 2018). The premise is that the nodal declination cycle of the Moon would force the Chandler wobble to a period of 433 days via a nonlinear interaction with the annual cycle. A detailed analysis of satellite peaks in the frequency spectrum strongly supports this model. Introducing the electromagnetic analog places it on an equal footing with a model that can be verified by a controlled lab experiment, see (A) vs (B) below.
Of course, if I had created a prompt to ChatGPT to simply inquire “What causes the Chandler wobble to cycle at 433 days?”, it would have essentially provided the Wikipedia answer, which is the hazy consensus culled from research since the wobble was discovered over 100 years ago.
Note that this “physics-free” answer provided by ChatGPT has nothing to do with the moon.
ADDED 3/26/2023
This blog post has a section on ChatGPT using MatPlotLib to create a visualization of orbiting planets.
This blog is late to the game in commenting on the physics of the Hollywood film Moonfall — but does that really matter? Geophysics research and glacially slow progress seem synonymous at this point. In social media, unless one jumps on the event of the day within an hour, it’s considered forgotten. However, difficult problems aren’t unraveled quickly, and that’s what he have when we consider the Moon’s influence on the Earth’s geophysics. Yes, tides are easy to understand, but any other impact of the Moon is considered warily, perhaps over the course of decades, not as part of the daily news & entertainment cycle.
what if the Moon was closer?
My premise: The movie Moonfall is a more pure climate-science-fiction film than Don’t Look Up. Discuss.
Regarding the gravity waves concentrically emanating from the Tonga explosion
“It’s really unique. We have never seen anything like this in the data before,” says Lars Hoffmann, an atmospheric scientist at the Jülich Supercomputing Centre in Germany.
“That’s what’s really puzzling us,” says Corwin Wright, an atmospheric physicist at the University of Bath, UK. “It must have something to do with the physics of what’s going on, but we don’t know what yet.”
The discovery was prompted by a tweet sent to Wright on 15 January from Scott Osprey, a climate scientist at the University of Oxford, UK, who asked: “Wow, I wonder how big the atmospheric gravity waves are from this eruption?!” Osprey says that the eruption might have been unique in causing these waves because it happened very quickly relative to other eruptions. “This event seems to have been over in minutes, but it was explosive and it’s that impulse that is likely to kick off some strong gravity waves,” he says. The eruption might have lasted moments, but the impacts could be long-lasting. Gravity waves can interfere with a cyclical reversal of wind direction in the tropics, Osprey says, and this could affect weather patterns as far away as Europe. “We’ll be looking very carefully at how that evolves,” he says.
This (“cyclical reversal of wind direction in the tropics”) is referring to the QBO, and we will see if it has an impact in the coming months. Hint: the QBO from the last post is essentially modeling gravity waves arising from the tidal forcing as driving the cycle. Also, watch the LOD.
Perhaps the lacking is in applying this simple scientific law: for every action there is a reaction. Always start from that, and also consider: an object that is in motion, tends to stay in motion. Is the lack of observed Coriolis effects to first-order part of why the scientists are mystified? Given the variation of this force with latitude, the concentric rings perhaps were expected to be distorted according to spherical harmonics.
The research category is topological considerations of Laplace’s Tidal Equations (LTE = a shallow-water simplification of Navier-Stokes) applied to the equatorial thermocline — the following citations provides an evolutionary understanding that I have developed via presentations and publications over the last 6 years (working backwards)
Given that I have worked on this topic persistently over this span of time, I have gained considerable insight into how straightforward it has become to generate relatively decent fits to climate dipoles such as ENSO. Paradoxically, this is both good and bad. It’s good because the model’s recipe is algorithmically simply described in terms of plausibility and parsimony. That’s largely because it’s a straightforward non-linear extension of a conventional tidal analysis model. However that non-linearity opens up the possibility for many similar model fits that are equally good, yet difficult to discriminate between. So it’s bad in the sense that I can come to an impasse in selecting the “best” model.
This is oversimplifying a bit but the framing issue is if you knew the answer was 72, but have a hard time determining whether the question being posed was one of 2×36, 3×24, 4×18, 6×12, 8×9, 9×8, 12×6, 18×4, 24×3, or 36×2. Each gives the right answer, but potentially not the right mechanism. This is a fundamental problem with non-linear analysis.
A conventional tidal analysis by itself is just a few fundamental tidal factors (exactly 4) but made devastatingly accurate by the introduction of 2nd-order harmonics and cross-harmonics. All these harmonics are generated by non-linear effects but the frequency spectrum is so clean and distinct for a sea-level-height (SLH) time-series that the equivalent solution to k × F = 72 is essentially a scaling identification problem where the k is the scale factor for the corresponding cyclic tidal factors F.
Yet, by applying the non-linear LTE solution to the problem of modeling ENSO, we quickly discover that the algorithm is a wickedly effective harmonics and cross-harmonics generator. Any number of combinations of harmonics can develop an adequate fit depending on the variable LTE modulation applied. So it could be a small LTE modulation mixed with a wide assortment of tidal factors (the 2×36 case) or it could be a large LTE modulation mixed with a minimum of tidal factors (the 18×4 case). Or it could be something in between (e.g. the 8×9 case). This is all a result of the sine-of-a-sine non-linearity of the LTE formulation, related to the Mach-Zehnder modulation used in optical cryptography applications. The latter bit is the hint that things may not be unambiguously decoded given the fact that M-Z has been discovered to be nature’s own built-in encryption device.
However, there remains lots of light at the end of this tunnel, as I have also discovered that the tidal factor spread is likely largely governed by a single lunar tidal constituent, the 27.55 day anomalistic Mm cycle interfering with an annual impulse. That’s essentially 2 of the 4 tidal factors, with the other 2 lunar factors providing a 2nd-order correction. For the longest time I had been focused on the 13.66 day tropical Mf cycle as that also lead to a decent fit over the years, specifically since the first beat harmonic of the Mf cycle with the annual impulse is 3.8 years while the Mm cycle is 3.9 years. These two terms are close enough that they only go out-of-phase after ~130 years, which is the extent of the ENSO time-series. Only when you try to simplify a model fit by iterating over the space of factor combinations will you discover the difference between 3.8 and 3.9.
In terms of geophysics, the Mf factor is a tractional tidal forcing operating parallel to the ocean’s surface influenced by the moon’s latitudinal declination, while the Mm factor is a largely perpendicular gravitational forcing influenced by the perigean cycle of the Moon-to-Earth distance. The latter may be the “right mechanism” as each can give close to the “right answer”.
So the gist of the fitting observations is that far fewer harmonic factors are required for a decent Mm-based model than for a Mf-based model. This is slightly at the expense of a stronger LTE modulation, but the parsimony of an Mm-based model can’t be beat, as I will show via the following analysis charts…
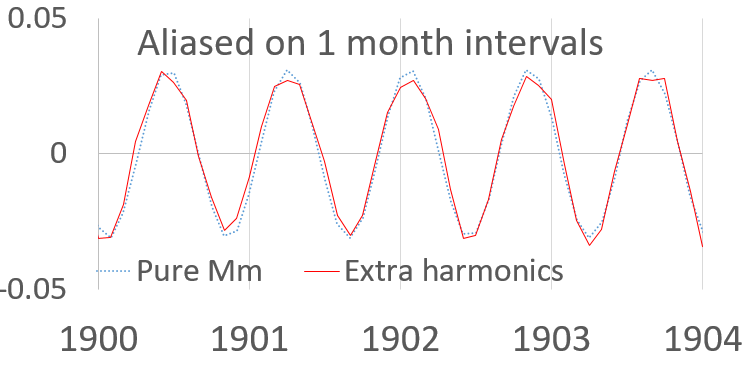
This is a good model fit based on a slightly modified Mm-based factorization, with a sample-and-hold placed on a strong annual impulse
The comparison of the modified Mm tidal factorization to the pure Mm is below (the reason the 27.55 day periodicity doesn’t appear is because of the monthly aliasing used in plotting).
The slight pattern on top of pure signal is due to a 6-year beat of the Mm period with the 27.212 day lunar draconic pattern indicating the time between equatorial nodal crossings of the moon. This is the strongest factor of the ascension cycle described in the solar and lunar ephemeris published recently by Sung-Ho Na. As highlighted above by numbered cycles, ~20 occur in the span of 120 years.
Below, an expanded look showing how slight a correction is applied
The integrated forcing after the annual impulse is shown below. The sample-and-hold integration exaggerates low-frequency differences so the distinction between the pure Mm forcing and Mm+harmonics is more apparent. The 6-year periodicity is obscured by longer term variations.
The log-scaled power spectra of the integrated tidal forcing is shown below. Note the overwhelmingly strong peak near the 0.25/year frequency (3.9 year cycle). The rest of the peaks are readily matched to periodicities in the Na ephemerides [1] according to their strength.
The LTE modulation is quite strong for this factorization. As shown below, the forcing levels need to sinusoidally fold several times over to match the observed ENSO behavior. See the recent post Inverting non-autonomous functions for a recipe to aid in iterating for the underlying LTE modulation.
The parsimony of this model can’t be emphasized enough. It’s equivalent to the agreement of a conventional tidal forcing analysis to a SLH time-series in that only a single lunar tidal factor accounts for a majority of the modulation. Only the challenge of finding the correct LTE modulation stands in the way of producing an unambiguously correct model for the underlying ENSO behavioral dynamics.
References
[1] Sung-Ho Na, Chapter 19 – Prediction of Earth tide, Editor(s): Pijush Samui, Barnali Dixon, Dieu Tien Bui, Basics of Computational Geophysics, Elsevier, 2021, Pages 351-372, ISBN 9780128205136, https://doi.org/10.1016/B978-0-12-820513-6.00022-9. (note: the ephemerides for the Earth-Moon-Sun system matches closely the online NASA JPL ephemerides generator available at https://ssd.jpl.nasa.gov/horizons, but this paper is more useful in that it algorithmically states the contributions of the various tidal factors in the source code supplied. Source code also available at https://github.com/pukpr/GeoEnergyMath/tree/master/src)